maxon motor también en los descapotables de Mercedes-Benz
Mercedes-Benz ofrece en su clase E un descapotable con paravientos automático integrado en la carrocería. El AIRCAP® reduce considerablemente las turbulencias en el espacio interior con sólo pulsar un botón.
Se encuentra completamente integrado en la carrocería y, cuando está desactivado, permanece discretamente oculto dentro del marco del parabrisas. Cuando se activa, actúa como cortaviento aerodinámico sobre el parabrisas, armonizando con la estética de la línea lateral del vehículo.
AIRCAP® consta un módulo deflector del viento accionado por botón ubicado en el marco del parabrisas y otro situado entre los reposacabezas traseros. Cuando el AIRCAP® está activado, desvía el aire por encima del habitáculo, consiguiendo que las corrientes en el interior del vehículo se reduzcan considerablemente. No sólo se puede activar cuando el vehículo está parado, también se puede activar mientras el vehículo está circulando hasta velocidades de 160 km/h. Una vez desplegado, se puede mantener activo incluso circulando a la máxima velocidad del vehículo.
La mejor elección del motor de maxon
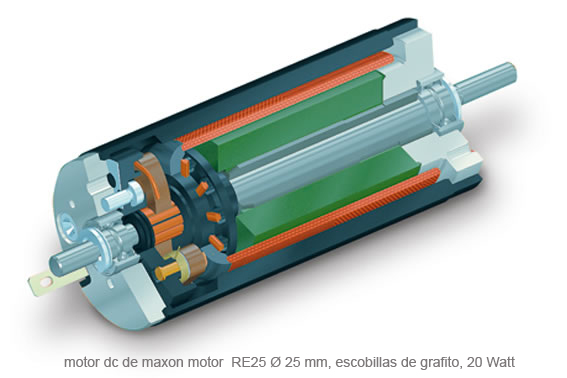
El AIRCAP® se acciona por un motor dc desarrollado por maxon motor GmbH, Sexau. Se trata de un diseño especial compuesto por un motor A-max 22 DC (motor dc con escobillas) y un reductor especial con tres etapas de salida.
Una de las características destacable es que se trata de un motor de tan sólo 22 mm que permite el montaje en serie del sistema en el marco del parabrisas mediante presillas sin tornillos.
Otra de las características de este motor cc es su robustez: gracias a su elevado par (hasta 7 Nm), el motor dc puede soportar las altas presiones del viento a más de 250 km/h mientras está activado (extendido).
Ahora el siguiente paso es adquirir una de estas joyas de Mercedes Benz y probar el sistema AIRCAP®.
https://www.maxonmotoriberica.es/wp-content/uploads/2013/06/AIRCAP-cuadrado.jpg376376https://www.maxonmotoriberica.es/wp-content/uploads/2019/08/Logo-maxon-group.png2013-06-27 13:55:142019-10-02 11:39:20Mercedes Benz confía en el motor dc de maxon motor
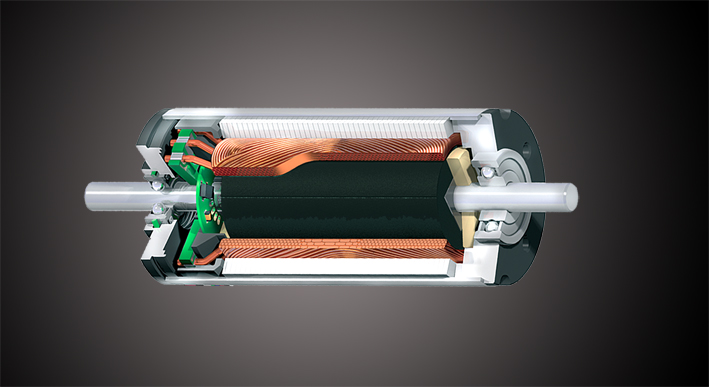
El EC-4pole 32 HD forma parte de la familia del EC 22 HD (Heavy Duty) y está diseñado para funcionar igualmente en las condiciones terrestres más extremas.
¿Qué es “Downhole Drilling”?
En la exploración terrestre para la obtención de petróleo y gas a grandes profundidades, es necesario que se realicen perforaciones de profundidades cercanas a los 2500 m que se amplían a 5000 metros, si consideramos la perforación direccional (orientación dinámica en otras direcciones de una perforación profunda) alcanzando longitudes totales de hasta 11000 metros.
(Datos relacionados sobre profundidad, vibraciones y temperatura en el post del EC 22 HD (Heavy Duty))
Si consideramos las fuertes vibraciones producidas en el proceso de perforación, las extremas temperaturas y la presión que existe en esas profundidades, resulta difícil imaginar cómo un motor dc puede funcionar de manera precisa y correcta soportando dichas condiciones.
¿Funcionamiento del motor brushless en aire o en aceite?
EL motor brushless EC-4pole 32 HD alcanza una potencia nominal de 220 W con un funcionamiento en aire. Si el funcionamiento tiene lugar en aceite, la potencia nominal del motor de 32 mm, asciende a 480 W; una elevada densidad de potencia. Con respecto al EC 22 HD, este nuevo motor brushless ha mejorado su rendimiento alcanzando el 89% en aire y más de un 80% en aceite.
Estos motores se pueden acoplar a las potentes y robustas reductoras planetarias GP 32 HD gracias a su sistema modular, contando además con otros accesorios como encoders, electrónicas de control.
¿Dónde podemos encontrar este motor brushless?
El EC-4pole 32 HD es la óptima elección para aplicaciones de robótica avanzada, robots de exploración, robots humanoides. En aquellos proyectos en los que el rendimiento del motor sea determinante como ocurre en herramientas de mano, equipos portátiles operados por baterías…este motor dc sin escobillas es el componente idóneo. Obviamente por su extrema resistencia a elevadas temperaturas, altas vibraciones e incluso ultra vacío, se convierte en la elección ideal para aplicaciones aeronáuticas y aeroespaciales.
La familia de los motores maxon EC Heavy Duty sigue creciendo y esperamos que su interés por ellos también.
https://www.maxonmotoriberica.es/wp-content/uploads/2013/05/EC32_HD_sq.jpg260260Maxon Motor Ibéricahttps://www.maxonmotoriberica.es/wp-content/uploads/2019/08/Logo-maxon-group.pngMaxon Motor Ibérica2013-05-30 11:01:552021-02-04 12:34:09Motor brushless de 480 W con reductora planetaria
Interesantes y prácticos tutoriales para accionar las electrónicas de control ESCON
Estas electrónicas de control destacan por sus extraordinarias prestaciones y su reducido tamaño. Pueden accionar de una manera eficaz y sencilla los motores DC y motores brushless (sin escobillas).
Debido a sus características, estas electrónicas de control de los motores de continua (motores dc y motores brushless) son la elección ideal para la tecnología de la automatización, de la robótica o para cualquier aplicación de mecatrónica. En aplicaciones portátiles, la familia ESCON es la elección adecuada debido a su gran eficacia y consumo optimizado ya que alcanza rendimientos en torno al 98%.
En esta lista de reproducción encontrará toda la información necesaria para hacer los diferentes ajustes de la electrónica de control (modo automático, modo manual), actualización de firmware, etc:
Tutorial para ajustar en modo experto la electrónica de control ESCON
Tutorial ESCON Studio para ajustar en modo automático de los parámetros de la electrónica de control
Tutorial para actualización de firmware (software) del ESCON Studio
Herramienta de Diagnóstico ESCON Studio
Demo de control de precisión del motor dc y motor brushless con maxon ESCON Servo Controller
Esperamos que encuentre esta información interesante para la puesta en marcha de su electrónica de control
https://www.maxonmotoriberica.es/wp-content/uploads/2013/05/escon_sq_.png278278https://www.maxonmotoriberica.es/wp-content/uploads/2019/08/Logo-maxon-group.png2013-05-17 14:12:032014-09-16 10:10:27Control de precisión para motores dc y motores brushless
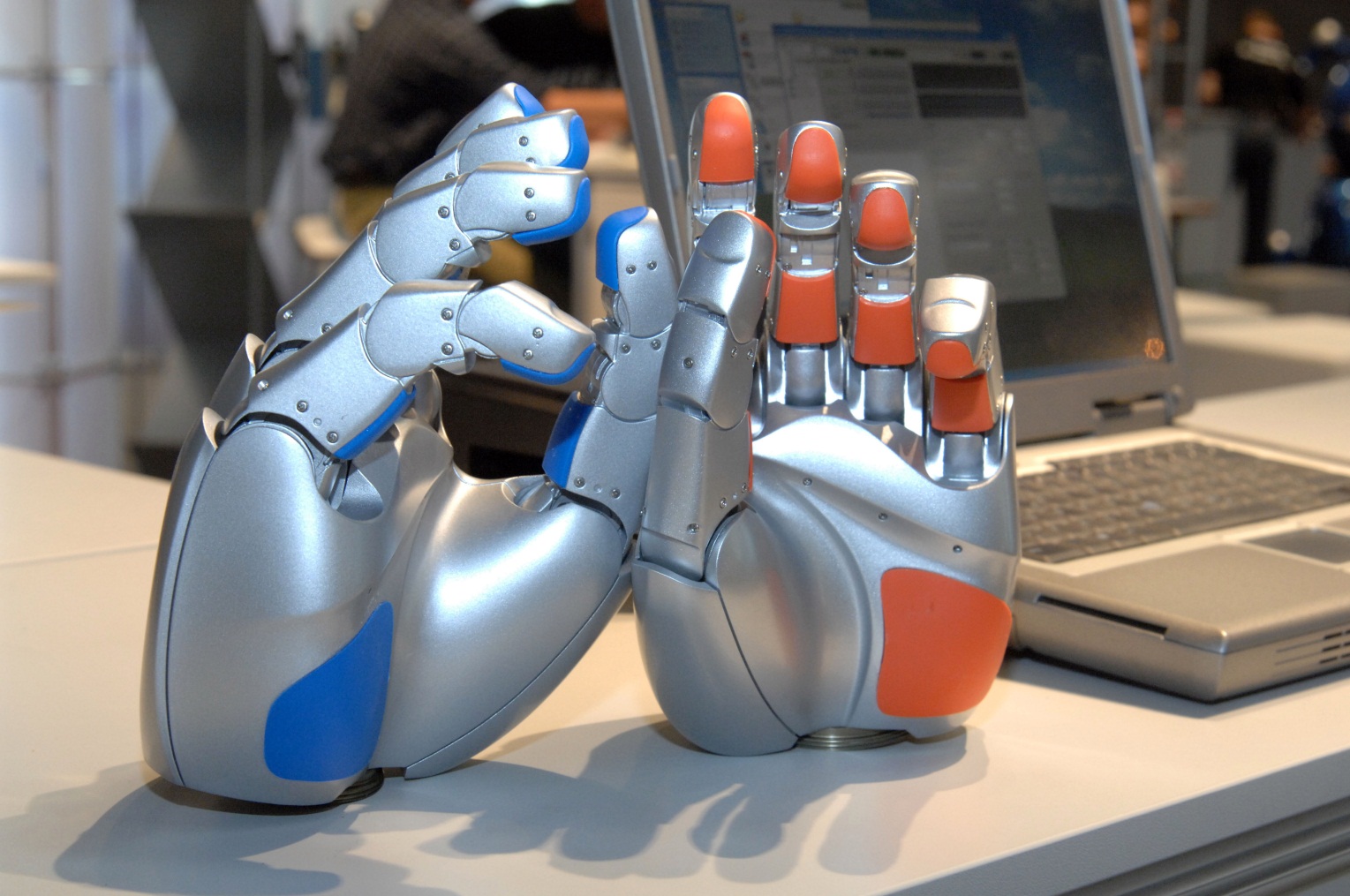
Los robots ya pueden sujetar objetos oponiendo sus pulgares
Las manos robóticas de dos o tres dedos pasarán a la historia gracias a los grandes avances en microelectrónica y micromecánica que permiten fabricar manos cuyos dedos tienen articulaciones antropomórficas controlables por separado.
La mano humana es un instrumento extraordinario, objeto de numerosas investigaciones científicas. El dedo pulgar despierta especial interés ya que es completamente oponible a los otros cuatro dedos y puede girar 90 °, perpendicular a la palma de la mano, mientras que los otros dedos sólo alcanzan un ángulo de 45 °.
Las manos robóticas del presente y futuro se benefician de estos trabajos de investigación. La agencia aeronáutica y espacial alemana DLR (Deutsche Zentrum für Luft- und Raumfahrt) ha desarrollado junto con el Instituto Harbin de Tecnología (HIT) la mano robótica DLRHIT II : una mano que consta de cinco dedos con cuatro articulaciones cada una y tres grados de libertad. Para agarrar también piezas cónicas, se necesitan cuatro dedos y el dedo pulgar que hace de “contrasoporte”.
Bus de alta velocidad para el control
Los motores brushless de la mano DLR-HIT II se instalan directamente en los dedos. Cada articulación de los dedos se dota con un sensor de par de fuerza y un sensor angular, ambos, de alta resolución. El gran volumen de datos necesario lo transmite un bus de alta velocidad. Un rápido feed-back con el que se comparan los valores de consigna y los valores reales es decisivo para la función de control, sobre todo en movimientos de precisión. Por tanto, además del gran volumen de datos es muy importante la velocidad de transmisión de los mismos. El bus de alta velocidad de 25 Mbps interno a la mano, con capacidad de tiempo real y especialmente diseñado para esta aplicación, se basa en FGPAs (Field Programmable Gate Arrays).
Motores brushless de diseño plano como unidades motrices
Cada dedo de esta mano robótica necesita varios actuadores, accionados independientemente: 15 motores brushless de corriente continua dotados de sensores Hall para cada mano. Se han seleccionado los maxon EC 20 flat por varias características decisivas: precio económico, altas prestaciones y pequeño tamaño. Estos motores brushless con sensores Hall, tienen un longitud de tan sólo 10,4 mm y un diámetro exterior de 21,2 mm y con un peso de 15 g por motor. Forman una unidad junto con los los reductores HarmonicDrive de igual diámetro de la serie HDUC 05.
Estos motores brushless de 3 W están disponibles en versiones de 12 ó 24 V con un par máximo de 8,04 mNm. Son motores altamente dinámicos y sus rodamientos de bolas precargados ofrecen respuestas de precisión a los comandos de control, incluso cuando se invierte el sentido de giro. Los sensores Hall son los encargados de comunicar al sistema de control la posición real exacta.
Complemento perfecto entre micromecánica y microelectrónica.
La ciencia de la robótica avanza rápidamente e irrumpe en nuestra vida diaria sin apenas darnos cuenta.
Esperamos que estas manos robóticas «atrapen» su atención
https://www.maxonmotoriberica.es/wp-content/uploads/2013/05/robotichand1.jpg199199https://www.maxonmotoriberica.es/wp-content/uploads/2019/08/Logo-maxon-group.png2013-05-07 12:25:352019-10-02 11:39:37Motores brushless en manos humanoides
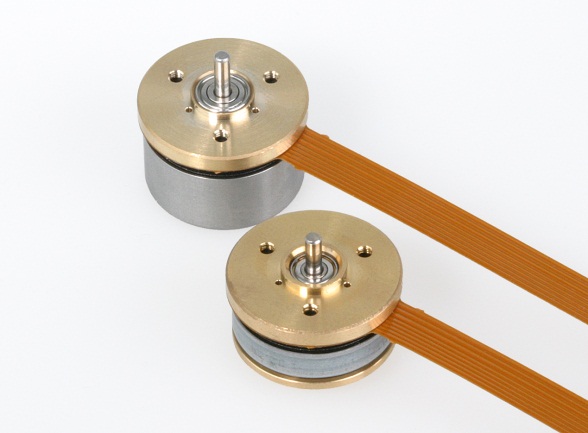
Para aplicaciones hápticas o de simuladores en medicina, robótica y aeronáutica se necesitan motores dc con bobinado sin hierro y escobillas de metal precioso.
¿Por qué escobillas de metal precioso y bobinado sin hierro en un motor dc?
Las escobillas de metal precioso permiten una gran calidad de contacto en la conmutación durante toda la vida en funcionamiento del producto, ya que son inertes a la corrosión. La muy baja resistencia de contacto entre la escobilla y la delga del colector, permite simplificar y facilitar las tareas de regulación.
Este motor dc o de corriente continua puede arrancar con muy bajas tensiones de trabajo, incluso después de estar parado mucho tiempo. Esta característica puede marcar la diferencia a la hora de hacer funcionar el motor con baterías bajas. A pesar de la conmutación de metal precioso este motor de continua es potente, entregando 53 mNm de par en continuo. Otra ventaja es que las emisiones de interferencias electromagnéticas quedan prácticamente eliminadas.
Este motor de continua se ha desarrollado especialmente para responder a los difíciles requerimientos de aplicaciones hápticas o de simuladores. En este caso, el motor está encargado de transmitir al operador una sensación de tacto tan precisa como es necesario para crear una realidad virtual táctil. Un ejemplo es el robot quirúrgico da Vinci™S HD Surgical System de la empresa Intuitive Surgical Inc.’s (Sunnyvale, CA)) en el que por un lado unos motores actúan sobre el instrumental quirúrgico para ejecutar los movimientos, y por otro lado estos motores cc suministran esta sensación táctil al cirujano.
Ahora sólo tiene que contactarnos y nuestros técnicos le informarán con detalle.
https://www.maxonmotoriberica.es/wp-content/uploads/2013/04/RE30EB-MR-Encoder_sq.jpg453453https://www.maxonmotoriberica.es/wp-content/uploads/2019/08/Logo-maxon-group.png2013-04-25 12:31:032019-10-02 11:39:46Motores dc de máxima precisión
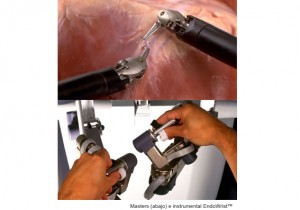
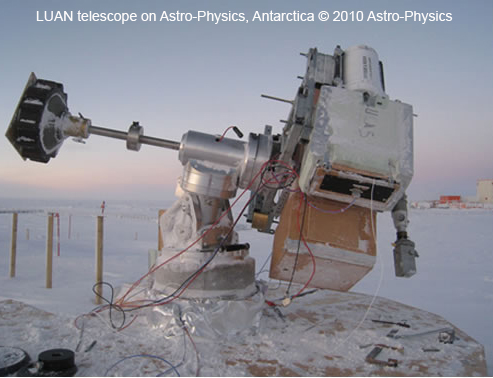
Telescopio libre de mantenimiento con motores de corriente continua de maxon motor
En las condiciones atmosféricas consideradas de las más duras en nuestro planeta, el telescopio de «Dome C» en la Antártida funciona ininterrumpidamente.
En la Antártida oriental a 3200 m sobre el nivel del mar, en uno de los lugares más fríos de la Tierra donde se registran temperaturas de hasta 84º C bajo cero se sitúa la estación de investigación «Station Concordia» (conocida como Dome C). El Laboratorio Universitario de Astrofísica de Niza (LUAN) tiene allí desde hace años, un telescopio en funcionamiento las 24 horas al día, los siete días de la semana.
El telescopio está montado sobre una montura de la casa Astro-Physics en régimen de funcionamiento continuo. Es lógico pensar que disponer de una solución que no requiera trabajos de mantenimiento es de vital importancia. Las bajas temperaturas y el viento extremo hacen que el mantenimiento sea casi imposible en los seis meses que dura la noche polar. Esto obliga a que todo el sistema sea capaz de funcionar sin fallos las 24 horas del día durante al menos seis meses.
El telescopio debe moverse de forma continua, sin sacudidas y de manera estable para poder orientarlo de forma fija a un determinado cuerpo astronómico en el firmamento.
¿Por qué motores maxon?
Según el Sr. Wally Piorkowski, científico y director de producción de Astro-Physics: “Por su larga vida útil y fiabilidad frente a fallos, Astro-Physics usa únicamente motores de la casa maxon motor para sus monturas de telescopio”.
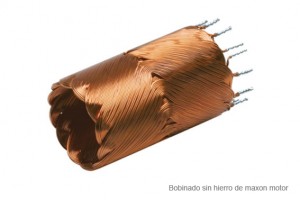
«Un criterio igualmente importante a favor de los motores de corriente continua de maxon es el hecho de que carecen de rizo de par», añade. Rizo de par es el movimiento a tirones que se produce en la mayoría de los motores con componentes de hierro. Por el contrario, los motores dc de maxon tienen un núcleo sin hierro y garantizan un funcionamiento exento de rizo de par, incluso a bajas velocidades, lo que es un requisito fundamental para utilizarlos en la montura de un telescopio.
Los motores dc de maxon motor tienen bobinados sin hierro e imanes de neodimio para obtener elevada potencia en un volumen mínimo. Los lubricantes que se utilizan en los rodamientos de bolas están formulados para las extremas temperaturas antárticas que reinan en Dome C. Dos ejes en cada montura
Un eje (el de ascensión recta), está paralelo al eje terrestre y permite el movimiento del telescopio sobre el ecuador terrestre. El reductor es un componente específicamente desarrollado por Astro-Physics. El segundo eje, (el de declinación), se halla en ángulo recto respecto al eje de ascensión recta y mueve el telescopio intermitentemente en la distancia angular del objeto al ecuador celeste. Los motores de continua de ambos ejes están equipados con encoders de 3 canales del tipo HEDS 5540. Esta disposición de los ejes, a 90º entre sí, hace posible la orientación en la dirección deseada.
Ahora sólo nos quedaría ver en directo el funcionamiento del telescopio. Nos tememos que esto tendrá que esperar hasta que los viajes a la Antártida estén al alcance de cualquiera.
Esperamos que hayan disfrutado con esta aplicación.
https://www.maxonmotoriberica.es/wp-content/uploads/2013/04/motor-dc-telescopio4.jpg163163https://www.maxonmotoriberica.es/wp-content/uploads/2019/08/Logo-maxon-group.png2013-04-16 11:55:452019-10-02 11:42:07Motores dc a -84°C en la Antártida
Determine el número de ejes de la placa madre, inserte el módulo EPOS, haga clic y listo.
En tan solo unos pasos configure el EPOS2 Module 36/2 : una placa base económica para aplicaciones de múltiples ejes (hasta 11 ejes) tanto para fines experimentales como para la producción en serie.
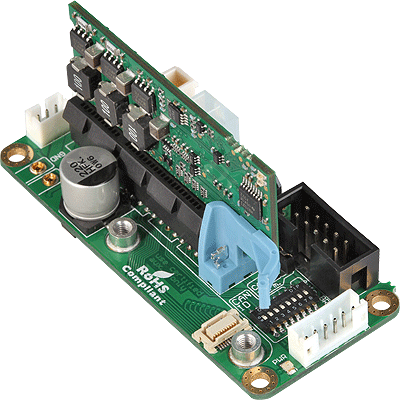
La gama EPOS ofrece unidades de control muy potentes para el manejo de motores de corriente continua (motores dc) y motores brushless. Se han diseñado para ejecutar tareas de posicionamiento de forma muy precisa y eficiente. Las electrónicas de control EPOS tienen una sencilla puesta en marcha.
Para integrarse en sistemas OEM, esta tarjeta base se ha concebido como módulo insertable. Para una rápida puesta en marcha del producto y para facilitar al cliente el diseño de esta placa base, maxon motor ofrece un kit básico con una placa de evaluación para un sistema de un eje.
Se puede pedir en su versión de 1 a 11 ejes y adaptarse a los requerimientos específicos de la aplicación. Además, se dispone de múltiples accesorios: cables de conexión o módulos de extensión para interfaces de comunicación, Entradas/Salidas o doble encoder.
https://www.maxonmotoriberica.es/wp-content/uploads/2013/04/tarjeta-control-sq.jpg270270https://www.maxonmotoriberica.es/wp-content/uploads/2019/08/Logo-maxon-group.png2013-04-12 09:10:482019-10-02 11:39:55Unidades de control para motores DC y motores brushless
driven 1//13: Importantes avances en la tecnología médica de implantes
Motores DC de maxon motor en prótesis e implantes.
Ya puede descargarse gratuitamente en App Store de Apple o a través de Google Play Store la revista “driven” de maxon motor para tablets.
En la nueva edición para tablets se presentan aplicaciones del mundo de la tecnología médica. Esta edición gira en torno a prótesis e implantes: desde la más avanzada prótesis de mano hasta implantes dosificadores de medicamentos. Podrá conocer todas las novedades de la tecnología protésica y cómo se emplean los productos maxon en ella:
¿Sabía que los motores dc de maxon son responsables del movimiento y la fuerza de agarre de las modernas prótesis de mano?
¿Ha leído algo sobre los micromotores que transportan medicamentos a través del cuerpo humano?
Si quiere mejorar sus conocimientos a la hora de seleccionar motores dc, eche un vistazo a la sección “Expertise” de la revista: en esta edición analizaremos cómo controlar varios motores de continua de forma sincronizada.
driven – La revista de maxon motor se publica tres veces al año para iPad y tablet PC con Android. Al final de cada año se recopila lo más destacado de las tres ediciones de ese año en una edición impresa.
https://www.maxonmotoriberica.es/wp-content/uploads/2014/03/driven-magazine-logo.png300300https://www.maxonmotoriberica.es/wp-content/uploads/2019/08/Logo-maxon-group.png2013-04-09 12:56:392014-09-16 10:14:31Revista “driven” de maxon motor
maxon motor en la Semana de la Robótica Alcabot- Hispabot 2013
del 4 al 10 de abril de 2013
Talleres, conferencias, competiciones, minitalleres y miniconferencias. Construye tu robot con el proyecto TuBot y participa de la Printer Party.
La Semana de la Robótica organiza un conjunto de actividades planificadas para difundir la robótica y motivar a los participantes para que se animen a la realización de robots autónomos.
El mayor valor añadido de la gente que tiene la afición de diseñar robots es el desarrollo de su creatividad y capacidad de innovación.
La Semana de la Robótica incluye conferencias de divulgación orientadas a aficionados y a participantes, talleres de formación, minitalleres de iniciación, visitas de estudiantes de enseñanzas medias y las competiciones de robots en diferentes competiciones.
maxon motor ibérica participa de este evento entregando servomotores como premios para las competiciones de Sumo, Velocistas y Minisumos: motores dc y motores brushless ideales para robótica.
Además, hoy día 4 de Abril a las 17.00 participaremos de este evento con una conferencia sobre Aplicaciones Industriales de los motores de Corriente Continua mostrando aplicaciones industriales en las que el uso de los motores de corriente continua son la mejor solución.
La conferencia tendrá lugar en el Salón de Actos (Zona Norte) – Jueves 4 de abril de 17:00 a 18:00 Ponente: D. Miguel Cano. Country Manager de maxon motor ibérica s.a. @maxonmotores
https://www.maxonmotoriberica.es/wp-content/uploads/2013/04/image_400x400.jpg400400https://www.maxonmotoriberica.es/wp-content/uploads/2019/08/Logo-maxon-group.png2013-04-04 12:24:422014-09-25 17:15:17Semana de la Robótica Alcabot- Hispabot 2013
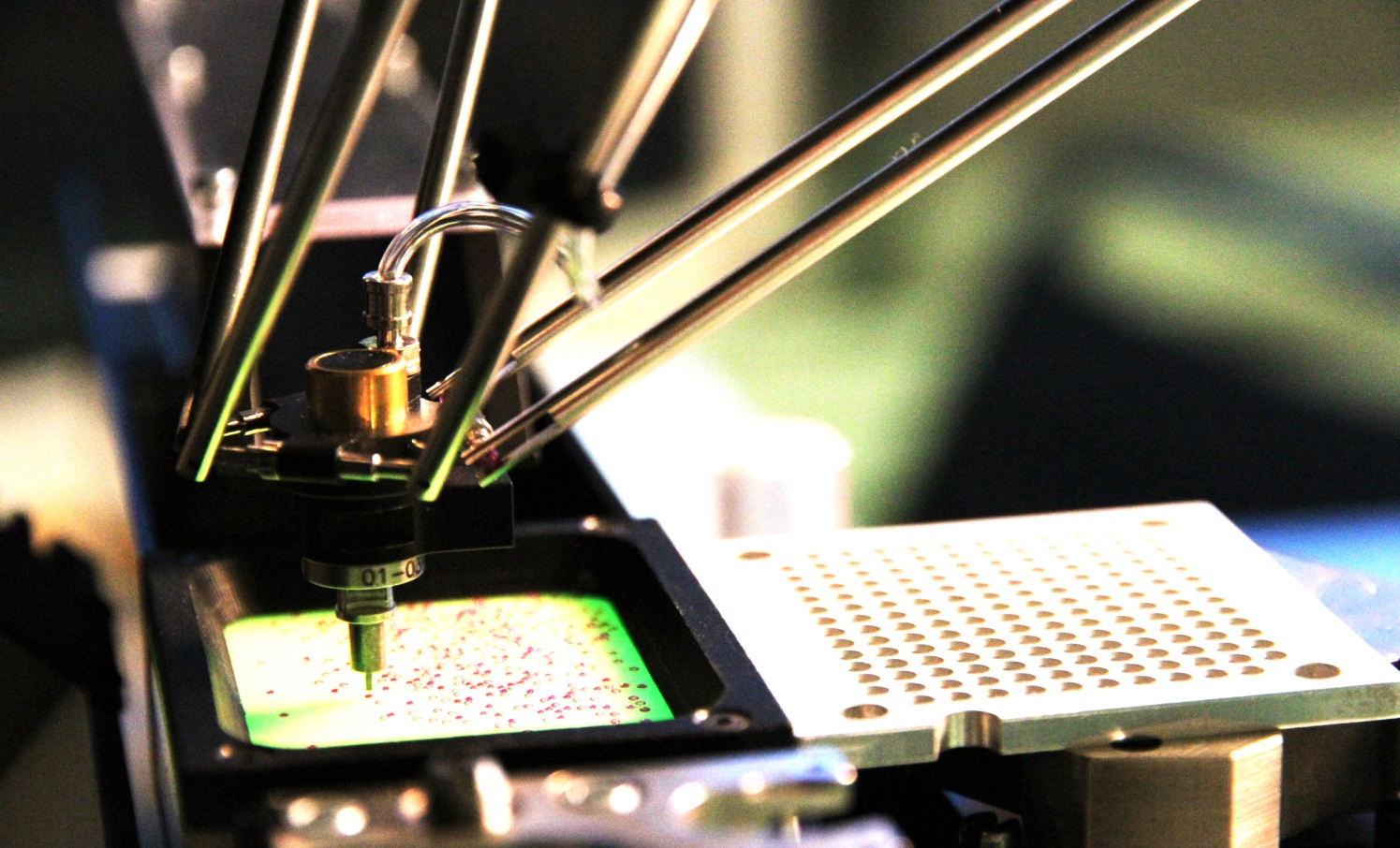
Hoy en día, los microcomponentes y microsistemas van reduciendo su tamaño de manera constante, y a la vez se van desarrollando sistemas de producción en dimensiones macroscópicas.
Una empresa suiza ha revolucionado el mercado con una gama completa de productos con los potentes motores brushless de maxon que garantizan movimientos dinámicos de alta precisión.
La especialidad de Asyrils es el desarrollo y la integración de sistemas mecatrónicos para una manipulación automática, rápida y flexible de mini o microcomponentes de la micro, nano y biotecnología respondiendo a preguntas esenciales como: ¿es posible construir un microrobot con un tamaño de 100 x 100 x 100 mm3?, ¿cuál debería ser la cinemática ideal de tal robot?.
Mientras que es relativamente sencillo miniaturizar las estructuras mecánicas de un robot, en el caso de los motores, esto solo es posible con limitaciones: “En los sistemas convencionales, los motores son muy grandes en comparación con los componentes mecánicos. Por ello, la cinemática convencional, por ejemplo la de un robot con brazo articulado, resulta también inadecuada, ya que sigue siendo necesario instalar grandes motores en las articulaciones”, explica el Dr. Alain Codourey, especialista en microrobótica.
Para encontrar una solución a esta creciente discrepancia, un equipo de investigadores inició la búsqueda de sistemas que fueran mucho más apropiados para la manipulación de componentes microtécnicos. “Al final llegamos a la conclusión de que las estructuras de cinemática paralela son las que ofrecen el máximo potencial para nuestros fines”, explica Codourey.
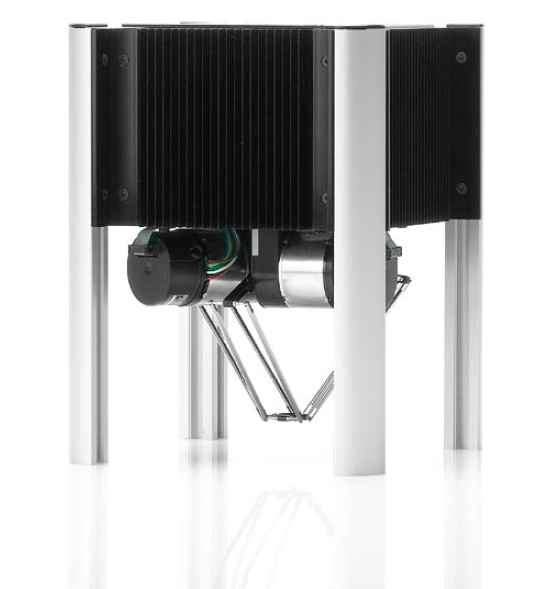
Con este objetivo en mente, se llevó primero a la perfección la idea del sistema axial de cinemática paralela. Para mantener el momento de inercia lo más bajo posible, todos los componentes se realizaron tan finos y ligeros como fue posible. Una gran ventaja de la configuración Delta elegida es que, aunque los motores brushless de maxon motor son los responsables del movimiento de los elementos cinemáticos, ellos mismos no se mueven, ya que están fijados a marcos de soporte y transmiten el movimiento directamente a la estructura. Este principio constructivo se puso en práctica en toda una gama de productos de robots Delta: los modelos “Desktop Delta”, “Power Delta” y “Pocket Delta” están todos construidos siguiendo este mismo principio.
En vez de motores sin escobillas sobredimensionados de gran potencia y, en consecuencia, grandes emisores de calor, en el Pocket Delta se emplean micromotores brushless de maxon motor que ahorran espacio. El mecanismo paralelo del robot está accionado por tres motores brushless EC‑i 40, todos ellos instalados en un placa encima del robot. De esta manera, la masa en movimiento es muy pequeña y, por ello, el robot es altamente dinámico. Para un ciclo de “pick-and-place”, el Pocket Delta necesita 0,33 s, realizando así tres ciclos por segundo. En combinación con la gran rigidez de la estructura cinemática, el robot presenta una precisión de repetición de menos de 3 micrómetros.
Los motores de corriente continua sin escobillas (motores brushless) tienen un diámetro de tan solo 40 mm y disponen de una potencia de 50 W. Para garantizar que el robot Delta
no solo sea rápido, sino también preciso, debe medirse con gran precisión la posición angular del motor. Para la detección de la posición, los motores brushless están directamente conectados a encoders de alta resolución. Además, cada brushless motor dispone de un freno de bloqueo, el cual ha sido diseñado por Asyril. Este freno consiste en pequeños pasadores que retienen los ejes del motor por medio de un resorte. Durante el funcionamiento del robot, electroimanes retiran estos pasadores para soltar el freno. Además, el controlador del robot está completamente integrado y la comunicación se realiza a través de una interfaz de Ethernet. Con sus características, el minirobot es especialmente adecuado para el desplazamiento y ensamblaje de minicomponentes. Está considerado como uno de los robots más rápidos y precisos de su categoría. Otra ventaja del diseño elegido es que es posible prescindir de un reductor para el Pocket Delta.
El Pocket delta se emplea en diferentes sectores industriales. Su especialidad es, sobre todo, la clasificación, selección y procesamiento de microcomponentes en la industria relojera. Esta solución es adecuada para el montaje de casi todas las piezas en un mecanismo de relojería, por ejemplo tornillos, remaches, pasadores o ruedas dentadas. Pero el Pocket Delta también se emplea en la tecnología médica y en la industria de la electrónica y los semiconductores. El tamaño típico de las piezas que mueve se encuentra entre 0,5 y 15 mm.
Esta web utiliza cookies técnicas, de personalización y de análisis, propias y de terceros, para anónimamente facilitarle la navegación y analizar estadísticas del uso de la web.
We may request cookies to be set on your device. We use cookies to let us know when you visit our websites, how you interact with us, to enrich your user experience, and to customize your relationship with our website.
Click on the different category headings to find out more. You can also change some of your preferences. Note that blocking some types of cookies may impact your experience on our websites and the services we are able to offer.
Essential Website Cookies
These cookies are strictly necessary to provide you with services available through our website and to use some of its features.
Because these cookies are strictly necessary to deliver the website, refusing them will have impact how our site functions. You always can block or delete cookies by changing your browser settings and force blocking all cookies on this website. But this will always prompt you to accept/refuse cookies when revisiting our site.
We fully respect if you want to refuse cookies but to avoid asking you again and again kindly allow us to store a cookie for that. You are free to opt out any time or opt in for other cookies to get a better experience. If you refuse cookies we will remove all set cookies in our domain.
We provide you with a list of stored cookies on your computer in our domain so you can check what we stored. Due to security reasons we are not able to show or modify cookies from other domains. You can check these in your browser security settings.
Google Analytics Cookies
These cookies collect information that is used either in aggregate form to help us understand how our website is being used or how effective our marketing campaigns are, or to help us customize our website and application for you in order to enhance your experience.
If you do not want that we track your visit to our site you can disable tracking in your browser here:
Other external services
We also use different external services like Google Webfonts, Google Maps, and external Video providers. Since these providers may collect personal data like your IP address we allow you to block them here. Please be aware that this might heavily reduce the functionality and appearance of our site. Changes will take effect once you reload the page.
Google Webfont Settings:
Google Map Settings:
Google reCaptcha Settings:
Vimeo and Youtube video embeds:
Other cookies
The following cookies are also needed - You can choose if you want to allow them:

 Se encuentra completamente integrado en la carrocería y, cuando está desactivado, permanece discretamente oculto dentro del marco del parabrisas. Cuando se activa, actúa como cortaviento aerodinámico sobre el parabrisas, armonizando con la estética de la línea lateral del vehículo.
Se encuentra completamente integrado en la carrocería y, cuando está desactivado, permanece discretamente oculto dentro del marco del parabrisas. Cuando se activa, actúa como cortaviento aerodinámico sobre el parabrisas, armonizando con la estética de la línea lateral del vehículo.


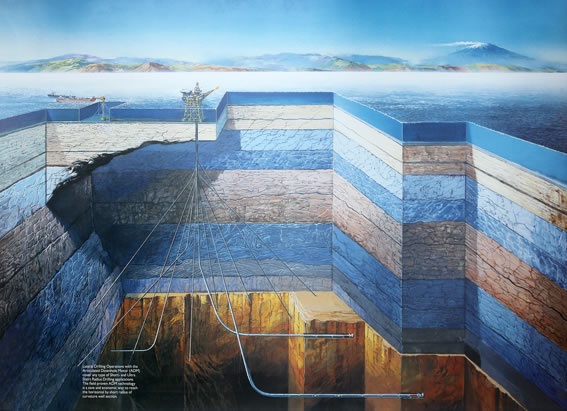 5000 metros, si consideramos la perforación direccional (orientación dinámica en otras direcciones de una perforación profunda) alcanzando longitudes totales de hasta 11000 metros.
5000 metros, si consideramos la perforación direccional (orientación dinámica en otras direcciones de una perforación profunda) alcanzando longitudes totales de hasta 11000 metros.