Control de posición compacto vía EtherCAT
 Las electrónicas de control de posición EPOS4 Compact de maxon están preparadas para una fácil conexión a través de Ethernet.
Las electrónicas de control de posición EPOS4 Compact de maxon están preparadas para una fácil conexión a través de Ethernet.
La serie EPOS4 Compact ahora pueden conectarse a redes EtherCAT, creando nuevas oportunidades a una gran variedad de aplicaciones.
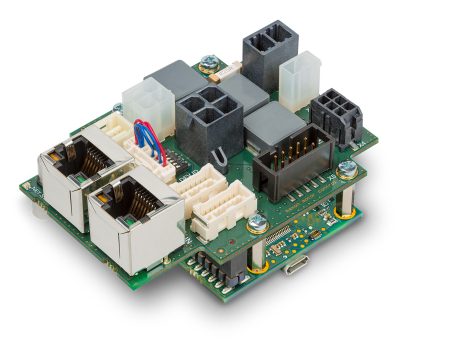
Con un diseño compacto, las electrónicas de control de posición de maxon EPOS4 Compact han ganado muchos seguidores en el mundo CANopen. Ahora estos controladores hablan un lenguaje más: las ultimas versiones EtherCAT cumplen la norma CoE (CAN application layer over EtherCAT), pudiendose integrar fácilmente en redes EtherCAT.
Los nuevos controladores con comunicación en tiempo real dan una solución plug-and-play sencilla para controlar motores DC brushless aumentando la intensidad de corriente máxima de hasta 30 A. Por a su diseño modular, son adecuados para aplicaciones con sistemas multi eje, en equipos pequeños, así como en robótica.
Dispone de una amplia gama de accesorios para facilitar la conexión y el proceso de integración. Además, junto al intuitivo software «EPOS Studio», tenemos bibliotecas de Windows DLL y Linux Shared Objects y están disponibles de manera gratuita para integrar los controladores la mayoría de de sistemas maestros.
Los controladores EtherCAT están disponibles en dos versiones con potencias de 50 V/8 A y 50 V/15 A. Proximamente saldrán al mercado otras variantes de la serie compacta (EPOS4 Compact 24/1.5 EtherCAT & EPOS4 Compact 50/5 EtherCAT).
Más información sobre los controladores EPOS en: epos.maxonmotor.es

