Motores brushless en manos humanoides
Los robots ya pueden sujetar objetos oponiendo sus pulgares
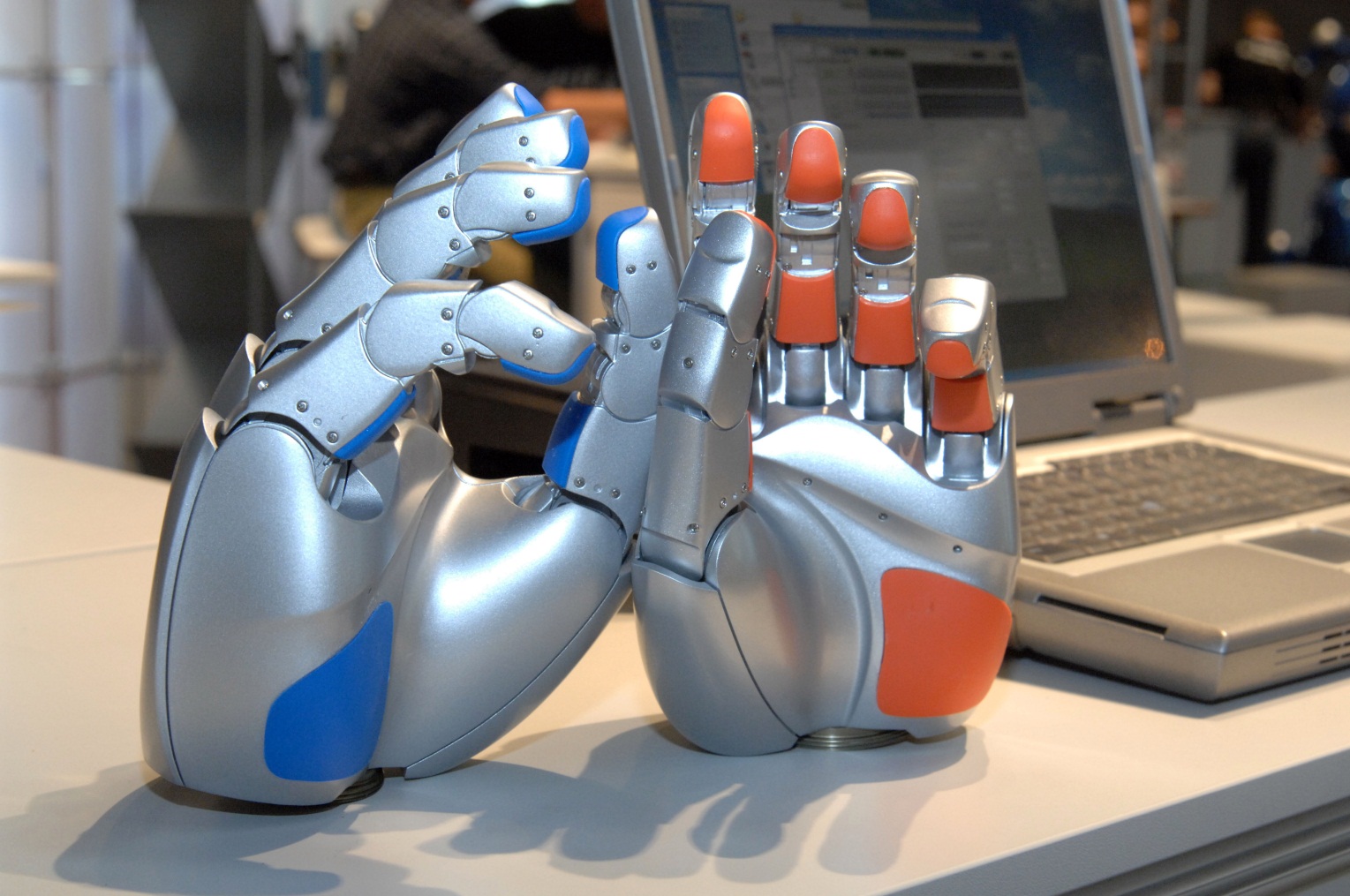
Las manos robóticas de dos o tres dedos pasarán a la historia gracias a los grandes avances en microelectrónica y micromecánica que permiten fabricar manos cuyos dedos tienen articulaciones antropomórficas controlables por separado.
La mano humana es un instrumento extraordinario, objeto de numerosas investigaciones científicas. El dedo pulgar despierta especial interés ya que es completamente oponible a los otros cuatro dedos y puede girar 90 °, perpendicular a la palma de la mano, mientras que los otros dedos sólo alcanzan un ángulo de 45 °.
Las manos robóticas del presente y futuro se benefician de estos trabajos de investigación. La agencia aeronáutica y espacial alemana DLR (Deutsche Zentrum für Luft- und Raumfahrt) ha desarrollado junto con el Instituto Harbin de Tecnología (HIT) la mano robótica DLRHIT II : una mano que consta de cinco dedos con cuatro articulaciones cada una y tres grados de libertad. Para agarrar también piezas cónicas, se necesitan cuatro dedos y el dedo pulgar que hace de “contrasoporte”.
Bus de alta velocidad para el control
Los motores brushless de la mano DLR-HIT II se instalan directamente en los dedos. Cada articulación de los dedos se dota con un sensor de par de fuerza y un sensor angular, ambos, de alta resolución. El gran volumen de datos necesario lo transmite un bus de alta velocidad. Un rápido feed-back con el que se comparan los valores de consigna y los valores reales es decisivo para la función de control, sobre todo en movimientos de precisión. Por tanto, además del gran volumen de datos es muy importante la velocidad de transmisión de los mismos. El bus de alta velocidad de 25 Mbps interno a la mano, con capacidad de tiempo real y especialmente diseñado para esta aplicación, se basa en FGPAs (Field Programmable Gate Arrays).
Motores brushless de diseño plano como unidades motrices
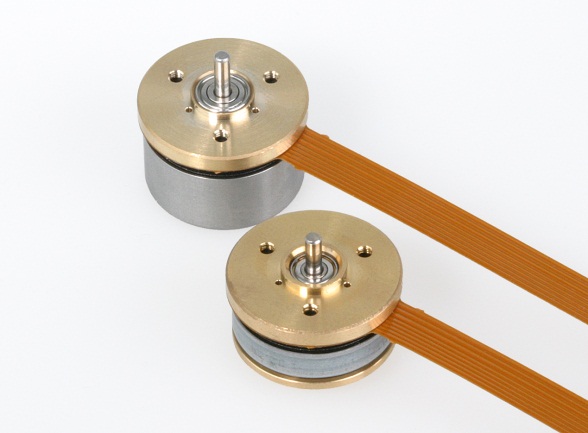 Cada dedo de esta mano robótica necesita varios actuadores, accionados independientemente: 15 motores brushless de corriente continua dotados de sensores Hall para cada mano. Se han seleccionado los maxon EC 20 flat por varias características decisivas: precio económico, altas prestaciones y pequeño tamaño. Estos motores brushless con sensores Hall, tienen un longitud de tan sólo 10,4 mm y un diámetro exterior de 21,2 mm y con un peso de 15 g por motor. Forman una unidad junto con los los reductores HarmonicDrive de igual diámetro de la serie HDUC 05.
Cada dedo de esta mano robótica necesita varios actuadores, accionados independientemente: 15 motores brushless de corriente continua dotados de sensores Hall para cada mano. Se han seleccionado los maxon EC 20 flat por varias características decisivas: precio económico, altas prestaciones y pequeño tamaño. Estos motores brushless con sensores Hall, tienen un longitud de tan sólo 10,4 mm y un diámetro exterior de 21,2 mm y con un peso de 15 g por motor. Forman una unidad junto con los los reductores HarmonicDrive de igual diámetro de la serie HDUC 05.
Estos motores brushless de 3 W están disponibles en versiones de 12 ó 24 V con un par máximo de 8,04 mNm. Son motores altamente dinámicos y sus rodamientos de bolas precargados ofrecen respuestas de precisión a los comandos de control, incluso cuando se invierte el sentido de giro. Los sensores Hall son los encargados de comunicar al sistema de control la posición real exacta.
Complemento perfecto entre micromecánica y microelectrónica.
La ciencia de la robótica avanza rápidamente e irrumpe en nuestra vida diaria sin apenas darnos cuenta.
Esperamos que estas manos robóticas «atrapen» su atención








