¿Cómo se consigue una excelente climatización en la cabina de pasajeros de un avión comercial? ¿Cómo se acciona el piloto automático en una cabina de pilotaje? Los motores dc maxon tienen la respuesta.
Echaremos un vistazo a los aviones supersónicos del Centro Alemán Aeroespacial (Deutsches Zentrum für Luft- und Raumfahrt) para comprobar que en un futuro no muy lejano podremos unos 90 minutos en viajar de París a Sidney.
Como regalo del primer cumpleaños del rover Curiosity en Marte, disfrutaremos de una vista de 360 grados de la superficie de Marte.
En la sección “Expertise” de la revista “driven”, puede ampliar su experiencia y conocimientos a la hora de se-leccionar los motores dc y tiene la posibilidad de solucionar un problema relacionado con motores de continua y poder elegir su propio motor DCX online y configurarlo para su aplicación.
“driven – La revista de maxon motor” se publica tres veces al año para iPad y Tablet PC con Android. Al final de cada año se compila en una edición impresa lo más destacado de las tres ediciones. La revista de maxon motor puede descargarse gratuitamente en App Store de Apple o a través de Google Play Store.
https://www.maxonmotoriberica.es/wp-content/uploads/2014/06/Captura-e1410854358218.png494494https://www.maxonmotoriberica.es/wp-content/uploads/2019/08/Logo-maxon-group.png2014-05-26 12:24:152014-09-25 17:11:01Los motores dc de maxon motor en la ingeniería aeroespacial
El EC-4pole 32 HD forma parte de la familia del EC 22 HD (Heavy Duty) y está diseñado para funcionar igualmente en las condiciones terrestres más extremas.
¿Qué es “Downhole Drilling”?
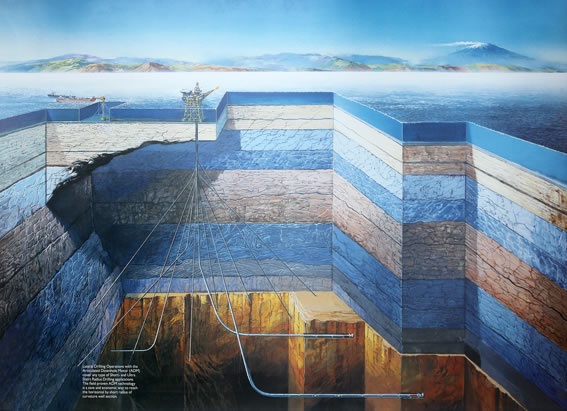
En la exploración terrestre para la obtención de petróleo y gas a grandes profundidades, es necesario que se realicen perforaciones de profundidades cercanas a los 2500 m que se amplían a 5000 metros, si consideramos la perforación direccional (orientación dinámica en otras direcciones de una perforación profunda) alcanzando longitudes totales de hasta 11000 metros.
(Datos relacionados sobre profundidad, vibraciones y temperatura en el post del EC 22 HD (Heavy Duty))
Si consideramos las fuertes vibraciones producidas en el proceso de perforación, las extremas temperaturas y la presión que existe en esas profundidades, resulta difícil imaginar cómo un motor dc puede funcionar de manera precisa y correcta soportando dichas condiciones.
¿Funcionamiento del motor brushless en aire o en aceite?
EL motor brushless EC-4pole 32 HD alcanza una potencia nominal de 220 W con un funcionamiento en aire. Si el funcionamiento tiene lugar en aceite, la potencia nominal del motor de 32 mm, asciende a 480 W; una elevada densidad de potencia. Con respecto al EC 22 HD, este nuevo motor brushless ha mejorado su rendimiento alcanzando el 89% en aire y más de un 80% en aceite.
Estos motores se pueden acoplar a las potentes y robustas reductoras planetarias GP 32 HD gracias a su sistema modular, contando además con otros accesorios como encoders, electrónicas de control.
¿Dónde podemos encontrar este motor brushless?
El EC-4pole 32 HD es la óptima elección para aplicaciones de robótica avanzada, robots de exploración, robots humanoides. En aquellos proyectos en los que el rendimiento del motor sea determinante como ocurre en herramientas de mano, equipos portátiles operados por baterías…este motor dc sin escobillas es el componente idóneo. Obviamente por su extrema resistencia a elevadas temperaturas, altas vibraciones e incluso ultra vacío, se convierte en la elección ideal para aplicaciones aeronáuticas y aeroespaciales.
La familia de los motores maxon EC Heavy Duty sigue creciendo y esperamos que su interés por ellos también.
https://www.maxonmotoriberica.es/wp-content/uploads/2013/05/EC32_HD_sq.jpg260260Maxon Motor Ibéricahttps://www.maxonmotoriberica.es/wp-content/uploads/2019/08/Logo-maxon-group.pngMaxon Motor Ibérica2013-05-30 11:01:552021-02-04 12:34:09Motor brushless de 480 W con reductora planetaria
Los robots ya pueden sujetar objetos oponiendo sus pulgares
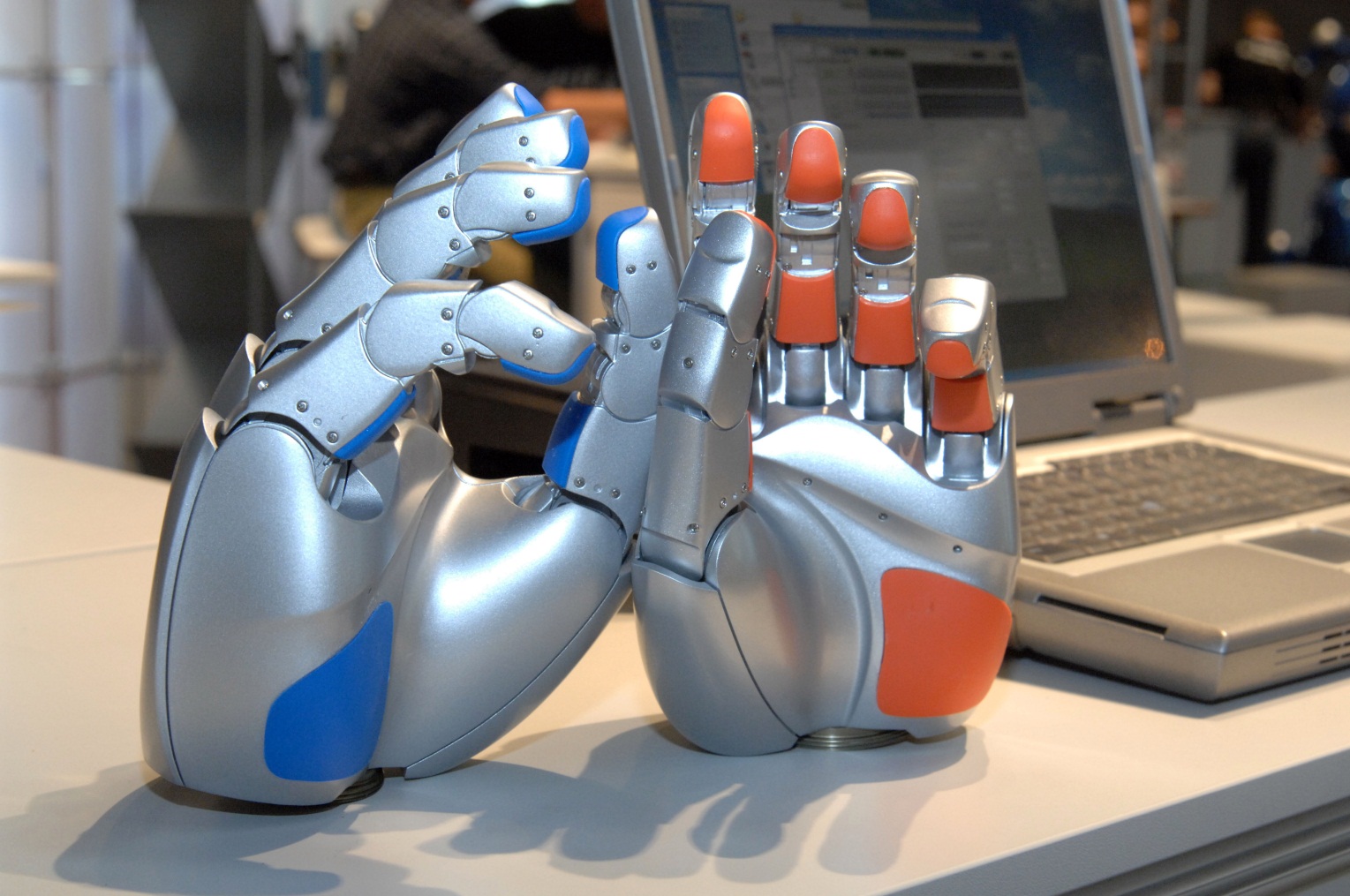
Las manos robóticas de dos o tres dedos pasarán a la historia gracias a los grandes avances en microelectrónica y micromecánica que permiten fabricar manos cuyos dedos tienen articulaciones antropomórficas controlables por separado.
La mano humana es un instrumento extraordinario, objeto de numerosas investigaciones científicas. El dedo pulgar despierta especial interés ya que es completamente oponible a los otros cuatro dedos y puede girar 90 °, perpendicular a la palma de la mano, mientras que los otros dedos sólo alcanzan un ángulo de 45 °.
Las manos robóticas del presente y futuro se benefician de estos trabajos de investigación. La agencia aeronáutica y espacial alemana DLR (Deutsche Zentrum für Luft- und Raumfahrt) ha desarrollado junto con el Instituto Harbin de Tecnología (HIT) la mano robótica DLRHIT II : una mano que consta de cinco dedos con cuatro articulaciones cada una y tres grados de libertad. Para agarrar también piezas cónicas, se necesitan cuatro dedos y el dedo pulgar que hace de “contrasoporte”.
Bus de alta velocidad para el control
Los motores brushless de la mano DLR-HIT II se instalan directamente en los dedos. Cada articulación de los dedos se dota con un sensor de par de fuerza y un sensor angular, ambos, de alta resolución. El gran volumen de datos necesario lo transmite un bus de alta velocidad. Un rápido feed-back con el que se comparan los valores de consigna y los valores reales es decisivo para la función de control, sobre todo en movimientos de precisión. Por tanto, además del gran volumen de datos es muy importante la velocidad de transmisión de los mismos. El bus de alta velocidad de 25 Mbps interno a la mano, con capacidad de tiempo real y especialmente diseñado para esta aplicación, se basa en FGPAs (Field Programmable Gate Arrays).
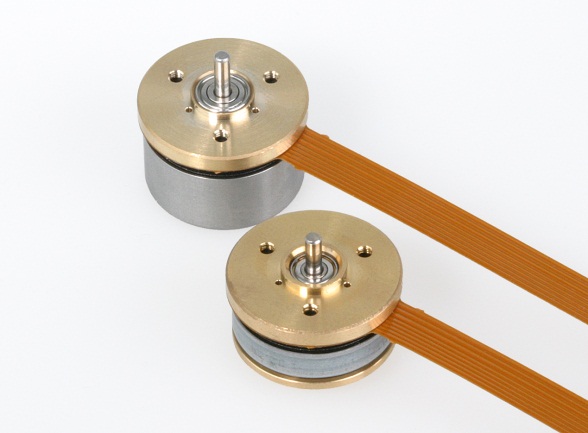
Motores brushless de diseño plano como unidades motrices
Cada dedo de esta mano robótica necesita varios actuadores, accionados independientemente: 15 motores brushless de corriente continua dotados de sensores Hall para cada mano. Se han seleccionado los maxon EC 20 flat por varias características decisivas: precio económico, altas prestaciones y pequeño tamaño. Estos motores brushless con sensores Hall, tienen un longitud de tan sólo 10,4 mm y un diámetro exterior de 21,2 mm y con un peso de 15 g por motor. Forman una unidad junto con los los reductores HarmonicDrive de igual diámetro de la serie HDUC 05.
Estos motores brushless de 3 W están disponibles en versiones de 12 ó 24 V con un par máximo de 8,04 mNm. Son motores altamente dinámicos y sus rodamientos de bolas precargados ofrecen respuestas de precisión a los comandos de control, incluso cuando se invierte el sentido de giro. Los sensores Hall son los encargados de comunicar al sistema de control la posición real exacta.
Complemento perfecto entre micromecánica y microelectrónica.
La ciencia de la robótica avanza rápidamente e irrumpe en nuestra vida diaria sin apenas darnos cuenta.
Esperamos que estas manos robóticas «atrapen» su atención
https://www.maxonmotoriberica.es/wp-content/uploads/2013/05/robotichand1.jpg199199https://www.maxonmotoriberica.es/wp-content/uploads/2019/08/Logo-maxon-group.png2013-05-07 12:25:352019-10-02 11:39:37Motores brushless en manos humanoides
Hoy en día, los microcomponentes y microsistemas van reduciendo su tamaño de manera constante, y a la vez se van desarrollando sistemas de producción en dimensiones macroscópicas.
Una empresa suiza ha revolucionado el mercado con una gama completa de productos con los potentes motores brushless de maxon que garantizan movimientos dinámicos de alta precisión.
La especialidad de Asyrils es el desarrollo y la integración de sistemas mecatrónicos para una manipulación automática, rápida y flexible de mini o microcomponentes de la micro, nano y biotecnología respondiendo a preguntas esenciales como: ¿es posible construir un microrobot con un tamaño de 100 x 100 x 100 mm3?, ¿cuál debería ser la cinemática ideal de tal robot?.
Mientras que es relativamente sencillo miniaturizar las estructuras mecánicas de un robot, en el caso de los motores, esto solo es posible con limitaciones: “En los sistemas convencionales, los motores son muy grandes en comparación con los componentes mecánicos. Por ello, la cinemática convencional, por ejemplo la de un robot con brazo articulado, resulta también inadecuada, ya que sigue siendo necesario instalar grandes motores en las articulaciones”, explica el Dr. Alain Codourey, especialista en microrobótica.
Para encontrar una solución a esta creciente discrepancia, un equipo de investigadores inició la búsqueda de sistemas que fueran mucho más apropiados para la manipulación de componentes microtécnicos. “Al final llegamos a la conclusión de que las estructuras de cinemática paralela son las que ofrecen el máximo potencial para nuestros fines”, explica Codourey.
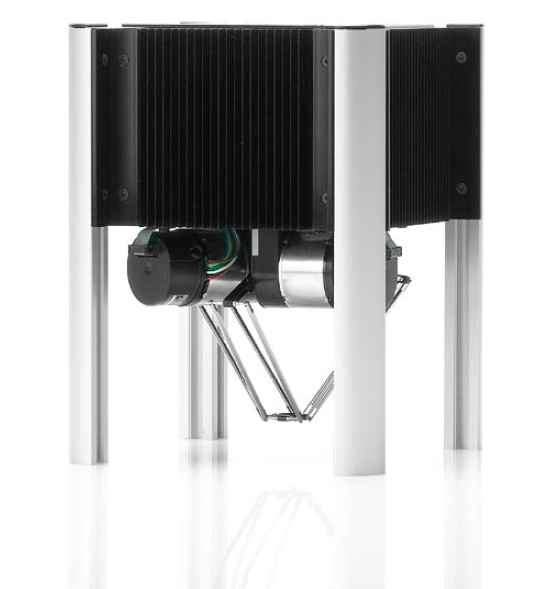
Con este objetivo en mente, se llevó primero a la perfección la idea del sistema axial de cinemática paralela. Para mantener el momento de inercia lo más bajo posible, todos los componentes se realizaron tan finos y ligeros como fue posible. Una gran ventaja de la configuración Delta elegida es que, aunque los motores brushless de maxon motor son los responsables del movimiento de los elementos cinemáticos, ellos mismos no se mueven, ya que están fijados a marcos de soporte y transmiten el movimiento directamente a la estructura. Este principio constructivo se puso en práctica en toda una gama de productos de robots Delta: los modelos “Desktop Delta”, “Power Delta” y “Pocket Delta” están todos construidos siguiendo este mismo principio.
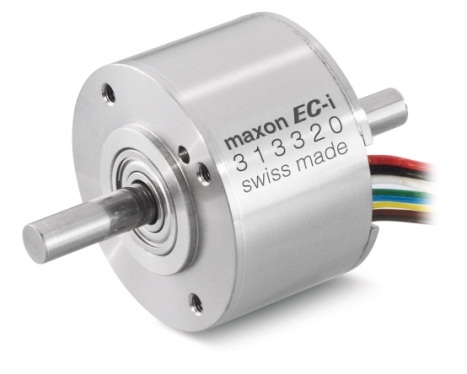
En vez de motores sin escobillas sobredimensionados de gran potencia y, en consecuencia, grandes emisores de calor, en el Pocket Delta se emplean micromotores brushless de maxon motor que ahorran espacio. El mecanismo paralelo del robot está accionado por tres motores brushless EC‑i 40, todos ellos instalados en un placa encima del robot. De esta manera, la masa en movimiento es muy pequeña y, por ello, el robot es altamente dinámico. Para un ciclo de “pick-and-place”, el Pocket Delta necesita 0,33 s, realizando así tres ciclos por segundo. En combinación con la gran rigidez de la estructura cinemática, el robot presenta una precisión de repetición de menos de 3 micrómetros.
Los motores de corriente continua sin escobillas (motores brushless) tienen un diámetro de tan solo 40 mm y disponen de una potencia de 50 W. Para garantizar que el robot Delta
no solo sea rápido, sino también preciso, debe medirse con gran precisión la posición angular del motor. Para la detección de la posición, los motores brushless están directamente conectados a encoders de alta resolución. Además, cada brushless motor dispone de un freno de bloqueo, el cual ha sido diseñado por Asyril. Este freno consiste en pequeños pasadores que retienen los ejes del motor por medio de un resorte. Durante el funcionamiento del robot, electroimanes retiran estos pasadores para soltar el freno. Además, el controlador del robot está completamente integrado y la comunicación se realiza a través de una interfaz de Ethernet. Con sus características, el minirobot es especialmente adecuado para el desplazamiento y ensamblaje de minicomponentes. Está considerado como uno de los robots más rápidos y precisos de su categoría. Otra ventaja del diseño elegido es que es posible prescindir de un reductor para el Pocket Delta.
El Pocket delta se emplea en diferentes sectores industriales. Su especialidad es, sobre todo, la clasificación, selección y procesamiento de microcomponentes en la industria relojera. Esta solución es adecuada para el montaje de casi todas las piezas en un mecanismo de relojería, por ejemplo tornillos, remaches, pasadores o ruedas dentadas. Pero el Pocket Delta también se emplea en la tecnología médica y en la industria de la electrónica y los semiconductores. El tamaño típico de las piezas que mueve se encuentra entre 0,5 y 15 mm.
Los motores maxon no sólo realizan su trabajo en condiciones como las de Marte sino que también operan en condiciones ambientales extremas como las que se existen bajo la corteza terrestre.
El motor brushless EC 22 HD (Heavy Duty) es un motor estándar para trabajar en condiciones extremadamente hostiles. Desarrollado para los requerimientos excepcionalmente altos de la industria de perforaciones en profundidad, este brushless motor soporta las condiciones de trabajo más extremas, en las cuales los “motores normales” dejarían de funcionar.
En profundidades superiores a 2.500 metros, las perforaciones de gran profundidad (en la industria de exploración del petróleo y del gas se denominan “Perforación de Pozos”) permiten la exploración de los recursos del petróleo y del gas. Esto, unido a la perforación direccional (la orientación dinámica de un pozo), permite la exploración de depósitos inaccesibles en perforaciones profundas de 5.000 metros y longitudes de pozos de hasta 11.000 metros. Hoy en día, la electrónica y sus respectivos motores brushless permiten una monitorización más sofisticada y el control de multitud de funciones durante el proceso perforación. Las elevadas vibraciones generadas durante el proceso de perforación y las condiciones de temperatura y presión en estas profundidades, hacen que el empleo de motores eléctricos sea un verdadero desafío.
Los diferentes modelos del EC 22 HD han sido diseñados para un funcionamiento al aire o sumergidos en aceite (inundados en fluido hidráulico). Su potencia nominal depende del medio que los rodea: 80 W al aire y, gracias a la excepcional disipación de calor, sumergidos en aceite llegan a los 240 W. Están diseñados también para funcionar con temperatura ambiente de más de 200ºC y presiones atmosféricas de hasta 1.700 bar. Otros de los requerimientos de estos motores brushless de 22mm de diámetro son la capacidad de soportar vibraciones de hasta 25 g (valor eficaz), así como impulsos e impactos de hasta 100 G, que es 100 veces la aceleración de la gravedad (ejemplo ilustrativo: un coche de carreras de Formula 1 soporta 2 G y un avión a reacción unos 13 G). Estos brushless motor cuentan con una elevada eficiencia (en aire hasta el 88%, en aceite más del 70%) y por ello ofrecen las mejores condiciones para aquellas aplicaciones que requieran ser operadas por baterías. Debido a la ausencia de par de retención, poseen unas características de regulación sobresalientes y están especialmente indicados para tareas de posicionamiento de elevada precisión, incluso a bajas velocidades.
El motor brushless (sin escobillas) está perfectamente preparado para su utilización en tecnología espacial, centrales eléctricas, así como en la industria de la automoción, industria aeronáutica, en minería o cualquiera que requiera movimientos altamente dinámicos.
https://www.maxonmotoriberica.es/wp-content/uploads/2013/03/EC22HD__bluesteel_fireandice_A2.jpg850850https://www.maxonmotoriberica.es/wp-content/uploads/2019/08/Logo-maxon-group.png2013-03-21 14:35:542019-10-02 11:41:16Motor brushless EC 22 HD
Esta web utiliza cookies técnicas, de personalización y de análisis, propias y de terceros, para anónimamente facilitarle la navegación y analizar estadísticas del uso de la web.
We may request cookies to be set on your device. We use cookies to let us know when you visit our websites, how you interact with us, to enrich your user experience, and to customize your relationship with our website.
Click on the different category headings to find out more. You can also change some of your preferences. Note that blocking some types of cookies may impact your experience on our websites and the services we are able to offer.
Essential Website Cookies
These cookies are strictly necessary to provide you with services available through our website and to use some of its features.
Because these cookies are strictly necessary to deliver the website, refusing them will have impact how our site functions. You always can block or delete cookies by changing your browser settings and force blocking all cookies on this website. But this will always prompt you to accept/refuse cookies when revisiting our site.
We fully respect if you want to refuse cookies but to avoid asking you again and again kindly allow us to store a cookie for that. You are free to opt out any time or opt in for other cookies to get a better experience. If you refuse cookies we will remove all set cookies in our domain.
We provide you with a list of stored cookies on your computer in our domain so you can check what we stored. Due to security reasons we are not able to show or modify cookies from other domains. You can check these in your browser security settings.
Google Analytics Cookies
These cookies collect information that is used either in aggregate form to help us understand how our website is being used or how effective our marketing campaigns are, or to help us customize our website and application for you in order to enhance your experience.
If you do not want that we track your visit to our site you can disable tracking in your browser here:
Other external services
We also use different external services like Google Webfonts, Google Maps, and external Video providers. Since these providers may collect personal data like your IP address we allow you to block them here. Please be aware that this might heavily reduce the functionality and appearance of our site. Changes will take effect once you reload the page.
Google Webfont Settings:
Google Map Settings:
Google reCaptcha Settings:
Vimeo and Youtube video embeds:
Other cookies
The following cookies are also needed - You can choose if you want to allow them:




 5000 metros, si consideramos la perforación direccional (orientación dinámica en otras direcciones de una perforación profunda) alcanzando longitudes totales de hasta 11000 metros.
5000 metros, si consideramos la perforación direccional (orientación dinámica en otras direcciones de una perforación profunda) alcanzando longitudes totales de hasta 11000 metros.